Autonomous Turtlebot
TurtleBot3 Burger used for solving autonomous navigation micro‑challenges.
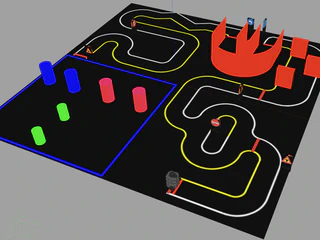
The ROS 1 package lets a TurtleBot3 Burger navigate a miniature “driving-school” world in Gazebo (and on the real robot). The map combines coloured lane markings, tunnels and obstacles. The goal was to write a perception and control node for the robot to pass through them.